在車(chē)頂天窗拼板激光焊接過(guò)程中,鐳爍光電的焊縫跟蹤系統(tǒng)通過(guò)高精度傳感和實(shí)時(shí)動(dòng)態(tài)調(diào)整技術(shù),可以實(shí)現(xiàn)不同厚度的板之自動(dòng)化拼焊,并確保焊接質(zhì)量與效率。
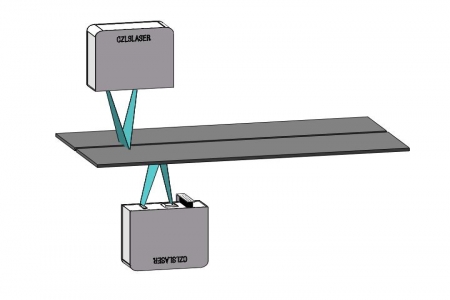
一、系統(tǒng)核心組成高精度視覺(jué)傳感器
采用激光實(shí)時(shí)捕捉焊縫三維形貌(如位置、間隙、錯(cuò)邊量),精度可達(dá)±0.01mm。智能控制單元
內(nèi)置AI算法(如深度學(xué)習(xí)或邊緣檢測(cè)算法),分析焊縫特征并生成修正指令,響應(yīng)時(shí)間<10ms。動(dòng)態(tài)執(zhí)行機(jī)構(gòu)
與焊接頭聯(lián)動(dòng),通過(guò)伺服電機(jī)或機(jī)械臂實(shí)時(shí)調(diào)整焊槍位置,補(bǔ)償工件裝配偏差或熱形變。
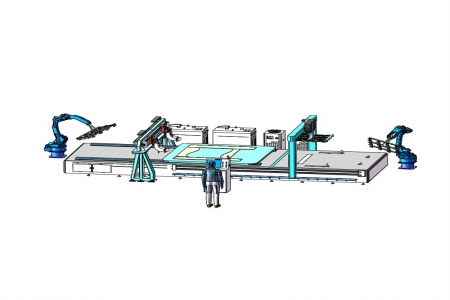
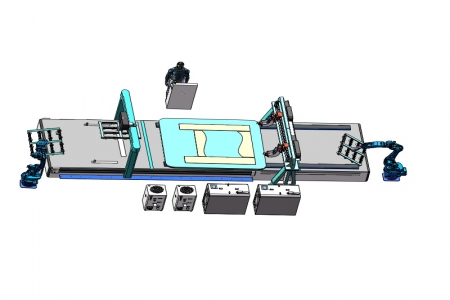
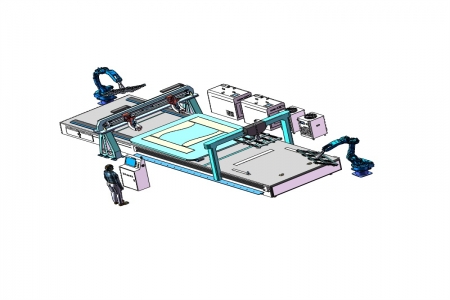
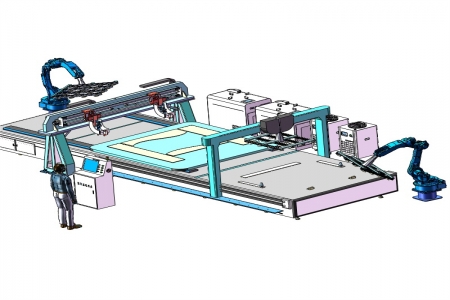
二、車(chē)頂天窗拼板焊接應(yīng)用流程
焊縫預(yù)掃描
焊接前,傳感器對(duì)天窗與車(chē)頂板的拼接處進(jìn)行3D掃描,識(shí)別焊縫軌跡(直線/曲線)及關(guān)鍵參數(shù)(間隙、坡口角度)。實(shí)時(shí)跟蹤與補(bǔ)償
動(dòng)態(tài)糾偏:焊接過(guò)程中持續(xù)監(jiān)測(cè)焊縫位置,若檢測(cè)到板材因熱變形或裝配誤差導(dǎo)致偏移,系統(tǒng)即刻調(diào)整激光焦點(diǎn)位置(如XYZ軸補(bǔ)償量)。
參數(shù)自適應(yīng):根據(jù)焊縫寬度變化自動(dòng)調(diào)節(jié)激光功率(如1-6kW范圍)和焊接速度(6-12m/min),并確保熔深一致。
多材料兼容
支持鋁合金、鍍鋅鋼等異種材料焊接,通過(guò)光譜分析實(shí)時(shí)監(jiān)測(cè)熔池狀態(tài),避免氣孔、裂紋。
三、技術(shù)優(yōu)勢(shì)
精度提升
將焊接定位誤差從人工的±0.5mm降低至±0.1mm,減少返工率超90%。效率優(yōu)化
自動(dòng)化跟蹤使焊接速度提升30%。復(fù)雜工況適應(yīng)
可應(yīng)對(duì)0.2-2mm板厚差異、0.5mm以內(nèi)裝配錯(cuò)位,以及環(huán)境振動(dòng)干擾。數(shù)字化集成
支持與PLC、機(jī)器人(如KUKA、FANUC)無(wú)縫對(duì)接,實(shí)現(xiàn)焊接參數(shù)云端管理及遠(yuǎn)程診斷。
鐳爍光電的焊縫跟蹤系統(tǒng)通過(guò)“感知-決策-執(zhí)行”閉環(huán),解決了車(chē)頂天窗激光焊接中的高精度、高動(dòng)態(tài)挑戰(zhàn),成為提升車(chē)身輕量化與自動(dòng)化水平的關(guān)鍵技術(shù),將工藝穩(wěn)定性與數(shù)字化能力深度融合,推動(dòng)汽車(chē)制造向智能化升級(jí)。